One of our unique features is using historical traffic density data in the optimization process. So for example, the Greenplan algorithm will take into account a traffic jam which always takes place on a certain intersection during the morning rush hour.
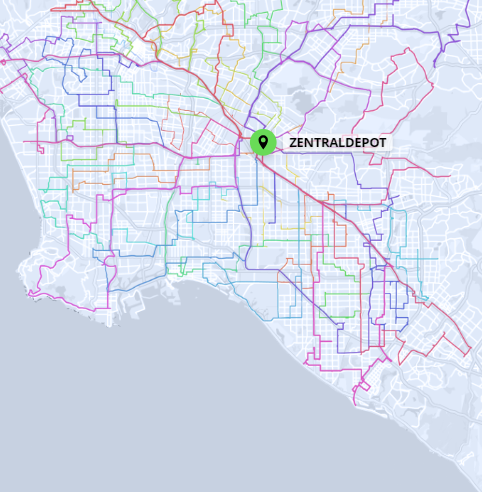
This is one of the main reasons why Greenplan produces tour plans that are not theoretical constructs, but are accurate, practical and ready to be used by your drivers.